すべての交通参加者を安全へと導く、マツダのコ・パイロットという考え方<後編>


マツダの新しいCX-5に試乗した。登場して5年が経過するクルマに大掛かりな変更を施した、というのも驚きだが、一層上質感を高めたその仕上がり具合には唸るものがあった。しかも構造面では僅かな変更だけでそれを実現している。
具体的にはセンタートンネルの補強ブレースへの減衰ボンドの採用と、シートレールの横剛性向上だけ。これが乗り味全体に相当な影響を与えているのだ。サスペンションのセッティングの方向性はMAZDA3で行なったバネレートを上げ、縮み側の減衰力を緩めるといったもので、微低速域の減衰力の変更も合わせることで、よりフラットなライド感を実現している。
これは筆者の推測に過ぎないのだが、新しいラージ群はFRが基本のプラットフォームになるだけでなく、電動化やコ・パイロットなどの技術を盛り込むことにより、価格帯がワンランク上がることになるのではないだろうか。そのためスモール群との価格帯の隙間を埋め、幅広いユーザーにマツダ車を選んでもらえる体制作りのために今回、CX−5に延命措置を施したのだ。
実際、これまでの横置きパワーユニットによるマツダのラージ群は、非常にリーズナブルな価格設定を実現していた。例えばCX-8は現時点でマツダ車の最上級車種であるにもかかわらず、200万円台からという車両価格を実現している。
パワーユニットや装備に差があるとはいえ、高い安全性を実現した衝突安全性に優れたボディや、ドライバーの操作に忠実に反応するシャーシ性能は共通した魅力だ。それがドライビングの上質感を演出して、ドライバーの満足感を高める源泉になっている。
CX−5では、今回のマイナーチェンジで3つにキャラクターを分けることで、より明確にユーザーの嗜好に合った乗り味や楽しみ方を提案しているのも新しい試みだ。都会的なSUVである従来のキャラクターに加えて、独りの休日では俊敏なハンドリング性能などスポーティな走りを楽しめるスポーツアピアランスと、オフローダー的要素を高めたフィールドジャーニーが加わった。
マツダは、マツダらしさを損なうことなく、よりユーザーの嗜好に寄り添うことで、CX−5をより魅力ある商品へと仕立て上げたのだ。

コ・パイロットで本当に凄いのは仮想運転技術
話を本題のコ・パイロットへと移そう。
「マツダ コ・パイロットは3つのコア技術から成り立っています。それはドライバー検知技術、HMI仮想運転技術、ドライバー異常時退避技術の3つです」(マツダ コ・パイロット開発主査 栃岡孝宏氏)。
ドライバー検知技術は、前編で紹介したように生体情報を利用することなく、ドライバーの視線や頭部の挙動、姿勢といったカメラによる画像解析と、ステアリングとペダルの操作量から総合的に異常を検知・判断するもの。
ドライバー異常時退避技術は、コ・パイロットの最も特徴的な部分で、ドライバーに代わって安全な場所でクルマを停止させるシステムだ。
残るHMI仮想運転技術は、ドライバーに代わって運転してくれるシステムではない。仮想と名称にある通り仮想空間、つまりコンピュータの内部でクルマを走らせるものだ。
筆者は当初、この技術の存在理由が理解できなかった。何のためにバーチャル空間でクルマを走らせるのか。自動運転を実現しているならともかく、コ・パイロットはユーザーが設定して運転を委ねられる装備ではない。それなのに、なぜバーチャルな空間で運転を再現する必要があるのか。
それは走行中、常にドライバーの運転操作が正常なモノであるか判断するためだった。視線や姿勢、操作の滑らかさだけでドライバーの体調急変を判断するのではなく、走行ルートの状態に基づいて運転操作がそれに沿っているのか、検証しているのである。何と言う贅沢ぶりであろう。
前編でドライバーの体調急変を検知する技術について質問し、生体情報を利用せずに実現していることについて紹介したが、それはバックグラウンドで運転を再現して、道路形状や日常の運転との差分を常に確認していることでもフォローされているのだ。
マツダはドライバーに普段通りに運転を楽しんでもらいながら、カメラで見守ることにより確実にしかも違和感などなく実現するために、ここまでドライバーをバックアップしているのだ。
今年導入されるのは、高速道路では非常停車帯などへ退避して停止するが、一般道では車線上に停止するなど機能が限定されたコ・パイロット1.0だ。そして2025年には一般道でも安全な場所まで走行して停止する2.0へアップデートされる計画だ。
今年登場するコ・パイロット1.0の先に見えたモノ
開発中のコ・パイロット2.0を体験させてもらう機会を得た。公道上では試作車(開発中のFRラージ群ではなく、MAZDA3)の助手席に同乗して、ドライバーが居眠りしたり、体調急変で意識を失っている様子を再現し、それを検知してどう動作するのかを確認することができた。
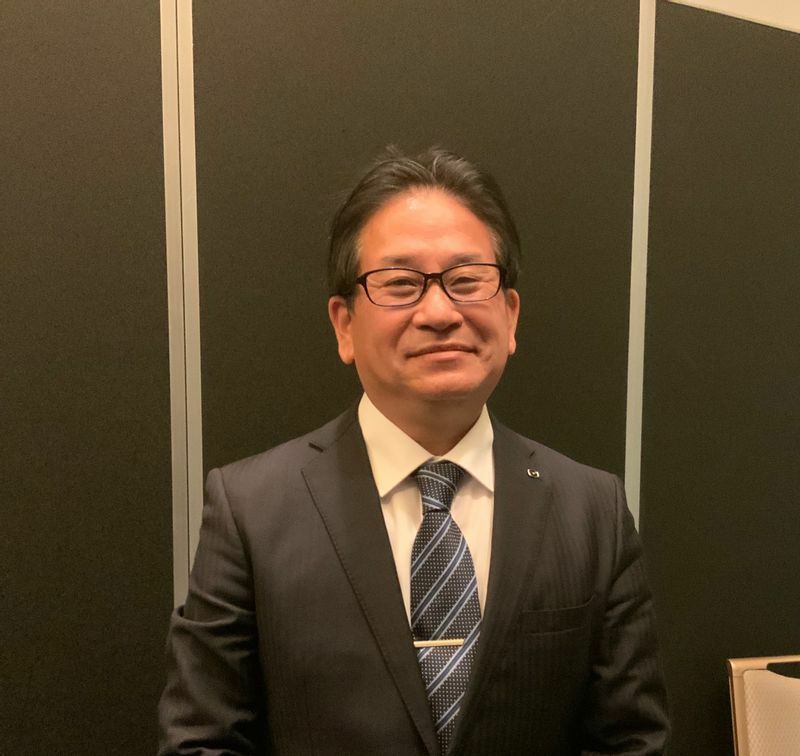
ドライバーの視線からどこを見ているか判断することで、ドライバーの体調急変を判断する技術も開発が進められている。ヒトは脳機能が正常な状態では、視界を幅広く様々な箇所に注意して運転しているが、脳機能が低下すると明るいところや視覚的に刺激のある部分に視線が集中するようになるのだとか。
サリエンシーマップと呼ばれる、注意の誘引度を可視化した画像解析により脳機能の低下を判断することで、ドライバーの体調急変を検知する仕組みだ。単に自動運転を目指すためなら、ここまでドライバーの特性を研究し分析する必要などない。だがマツダは人間中心の運転環境の可能性を追求するために、さらに深く研究し続けている。
「運転を止めると介護のリスクが2倍になるというデータもあるんです。これからはQOL(クオリティ・オブ・ライフ=生活の豊かさや満足で評価する考え方)を含めた判断をしていくことになるでしょう」。
筑波大学の医学医療系 市川政雄教授の研究によると、65歳以上のドライバー2844人を対象にした調査で4年後に運転を続けていた場合と返納などにより運転を止めていた場合を比較した場合、要介護になる確立は2倍にもなるらしい。運転を止めることで活動量が減り、生活への意欲も減少することで、認知機能や身体能力が低下してしまうことがデータとなって表れてきているのだ。
そして筆者のようなMT派にとっては気になることがある。MT車の設定が多いマツダだが、このコ・パイロットはATしか対応しないのだろうか。
「販売台数の比率から考えても、まずはAT車に搭載していくことを考えています」。
ということは、いずれはMTへの対応も構想の中には入っている、ということか。MTでの運転も楽しめ、ペダル踏み間違いを防ぎながら脳を活性化できる、しかも加齢により万一体調急変があっても、周囲に迷惑をかけることなく救助を要請してもらえる。
クルマ好きにとっては理想とも言えるQOLの追求をマツダが叶えてくれそうである。