「合体ロボ」実現か、離合集散ロボットの可能性


恐竜映画『ジュラシック・パーク』の原作者でもあるSF小説家マイケル・クライトンに『プレイ(Pray)』(2002年)という小説がある。ナノテクノロジーによって生み出された分散集合型の極小ロボットが人を襲い始める、という内容だが、ナノマシンが自律的に離合集散(Swarm)し、凶悪な肉食昆虫のように運動する。ただ、極小のために強い風に弱い。
ドローンではすでに実用化
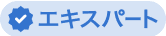
軍事用には似たような技術はすでにある。先日、米国のペンタゴン(国防総省)がカリフォルニア州で「マイクロドローン集団」のテスト飛行に成功、と発表した。これはF/A-18スーパーホーネット戦闘機から射出された103個の小型ドローンが、自律的に意志決定して編隊を組み、編隊が崩れると再び元に戻るなどしながら飛行した、というもの。「Perdix(ヤマウズラ)」と名付けられたドローンの編隊はクライトンのSF小説を彷彿とさせる。

米国ペンタゴンの「Perdix micro-UAV」集団のデモンストレーション。マッハ0.6の速度、マイナス10℃の気温に耐えられる。同機関HPより。
「Perdix」ドローンはMIT(マサチューセッツ工科大学)のLincoln Laboratoryで開発された。極小ではないが手に持って飛ばせるほどの大きさだ。開発した「BEAVER WORKS」のHPより。
自律分散システムというのは「分散しているエージェント(部分)がほかの部分と協調しつつ個々の目的を達成すると同時に、全体の目的をも達成する集合体」とされている。ビットコインも同じような原理で考えられたが、ドローンやロボットといった工学分野でもかなり以前から研究対象になってきた。
分散しているエージェントがプロセス(タスク)である場合、パソコンOSのマルチタスクのように振る舞って目的を達成する。ロボットの場合、個々の自律型ロボット自体がエージェントであれば、どのように協調作業を行わせるかが難しくなるだろう。ちなみに、ロボットの定義は「知能制御系・センサー系・駆動系」の三つを備えたマシンのことだ。
自己修復もできるロボット・エージェント群
この技術に関して興味深い論文が英国の科学雑誌『nature』の「Communication」に出た(※1)。ベルギーのベネルクス大学らの研究者は、自律的な感覚運動制御を持った小型ロボットの集合体を実証した、と言う。
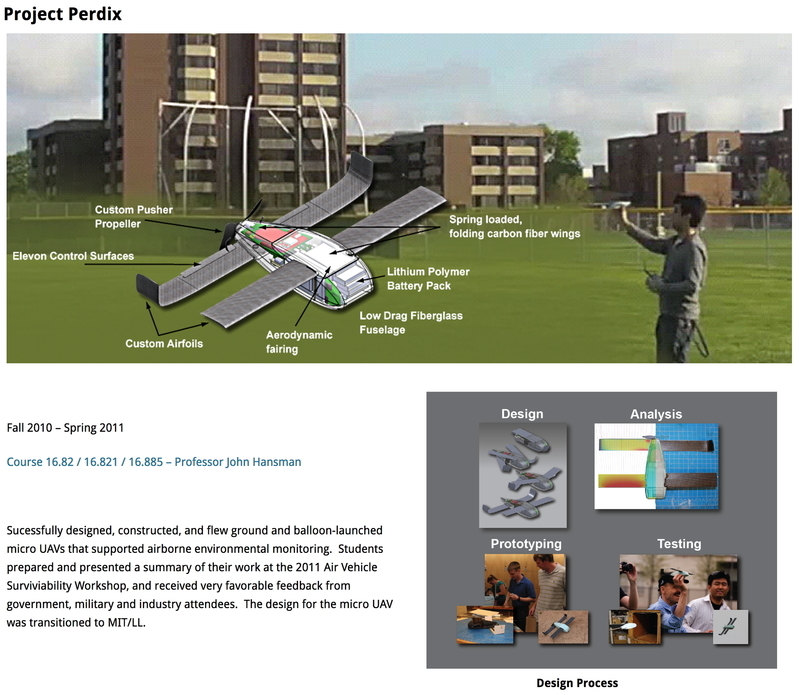
ロボット・エージェント群の離合集散の概念。10個のロボットを使っている。赤ロボットが「脳ユニット」の役割を担い、青ロボットはセンサーやアクチュエーターの役割を担う。赤と青は決まっていないので状況に応じて入れ替わる。via:Mithin Mathews, et al., "Mergeable nervous systems for robots." nature communication, 2017
前述したロボットの定義のように、個々のロボットは三つの要素を組み合わせて作られている。人間に喩えれば、知能制御系は脳、センサー系は神経、駆動系は筋肉や臓器だろう。脳からの信号を神経を経由して各筋肉へ伝える。
これらを備えた個々の人間が集まり、集団で行動するとシナジー効果が生まれ、生産性や戦闘力が高まったり、新しい工夫が考え出されたりする。だがロボットの場合、それぞれの機能は合目的的に作られているため、人間集団のように融通無碍に離合集散できない。それぞれのロボット・エージェントを制御したり調整したりすることには限界があった、というわけだ。
論文の研究者は、与えられた課題や環境に対し、集団として適切な形状や大きさを自律的に選んで行動するロボット・エージェントを開発した。個々のエージェントしても機能するが、集合体としてそれぞれが通信し合い、知能制御系やセンサー系、駆動系を連携させ、または分離させることもできる。
また、機能を失ったエージェントを除去し、自己修復することも可能だ。あるエージェントの知能制御系が機能を失っても、別のエージェント群が除去や修復を行う。論文では10個のエージェントを使っているが、研究者は、数を多くしていくことは簡単にできる、と言っている。この研究により、それぞれの目的に合わせて機能や大きさなどが考えられてきたロボットはなくなり、個々のロボット・エージェントが多種多様な目的に応じて離合集散するようなロボット・システムができるかもしれない。
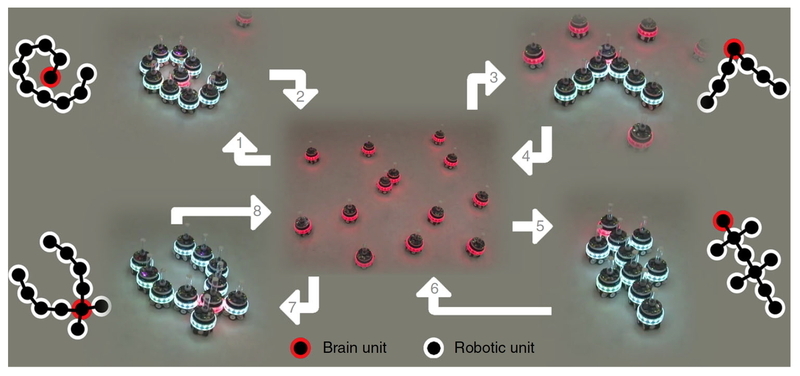
自己修復するロボット・エージェント群。a:知能制御系を担う赤ロボットに障害が発生し、他の青ロボット群がそれを検知する。b:障害を起こしたエージェントから他のエージェントが離れる(それぞれ知能制御系ができる)。cとd:一つの赤ロボットを知能制御系として、離れていた正常なロボット・エージェント群が再び集合する。via:Mithin Mathews, et al., "Mergeable nervous systems for robots." nature communication, 2017
ロボットをどう使うのか
こうした個々のロボット・エージェント自体は、大量生産で安価に作ることができるだろう。制御と調整さえできれば可能性は大きい。「野生型ロボット・エージェント群」が自律的に行動し、あたかも生物のように生存競争を生き抜いて人類を攻撃する、というクライトンの小説のような未来は、もうそこまできているのかもしれない。
ところで筆者は以前、日本で分散型ロボットの協調行動の研究をしていた東京大学の浅間一教授に話を聞いたことがある。浅間教授らの研究チームは、複数のロボットを使って複雑な内部構造の原発内で作業をさせることを想定したらしい。
原発事故の際などに活用するため開発を進めていたが、小泉純一郎内閣のいわゆる「原発安全神話」により研究を継続させることができなくなった、と言っていた。事故を前提とした研究には政府として研究支援できない、というわけだ。
どんな巧みなシステムも、それを使うのは人間だ。それぞれのエージェントの制御と協調の問題は、我々自身にこそ突きつけられているのだと言える。
※1:Mithin Mathews, Anders Lyhne Christensen, Rehan O'Grady, Francesco Mondada, Marco Dorigo, "Mergeable nervous systems for robots." nature communication, 8, 439, 2017
※:2017/09/14:14:55:タイトルを変更。