JAXA月着陸機「SLIM」が月面に届けた2つの超小型ロボットとは!?その知られざるミッションを紹介


宇宙をもっと身近に、スペースチャンネルです。
本日1月20日、JAXAの月着陸機「SLIM」が日本初の月面着陸に成功しました!これで日本は世界で5か国目に月へ着陸した国となりました、おめでとうございます!
ただし、SLIMは正常通り月面での太陽光発電ができておらず、バッテリーで駆動している状態とのことです。現在は延命措置を図っているとのことですが、SLIMの機能が復帰するのを皆さんで祈りましょう。
SLIMの着陸機に関する詳細は、以下の記事をご参照ください。
【速報】日本初の月面着陸に成功!JAXA月着陸機「SLIM」驚異のピンポイント着陸技術とは?
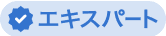
そしてSLIMは月面降下中に、二つの小型月面ロボットを放出することにも成功しました。本日は、あまり知られていないこれらのロボットについて解説していきます。
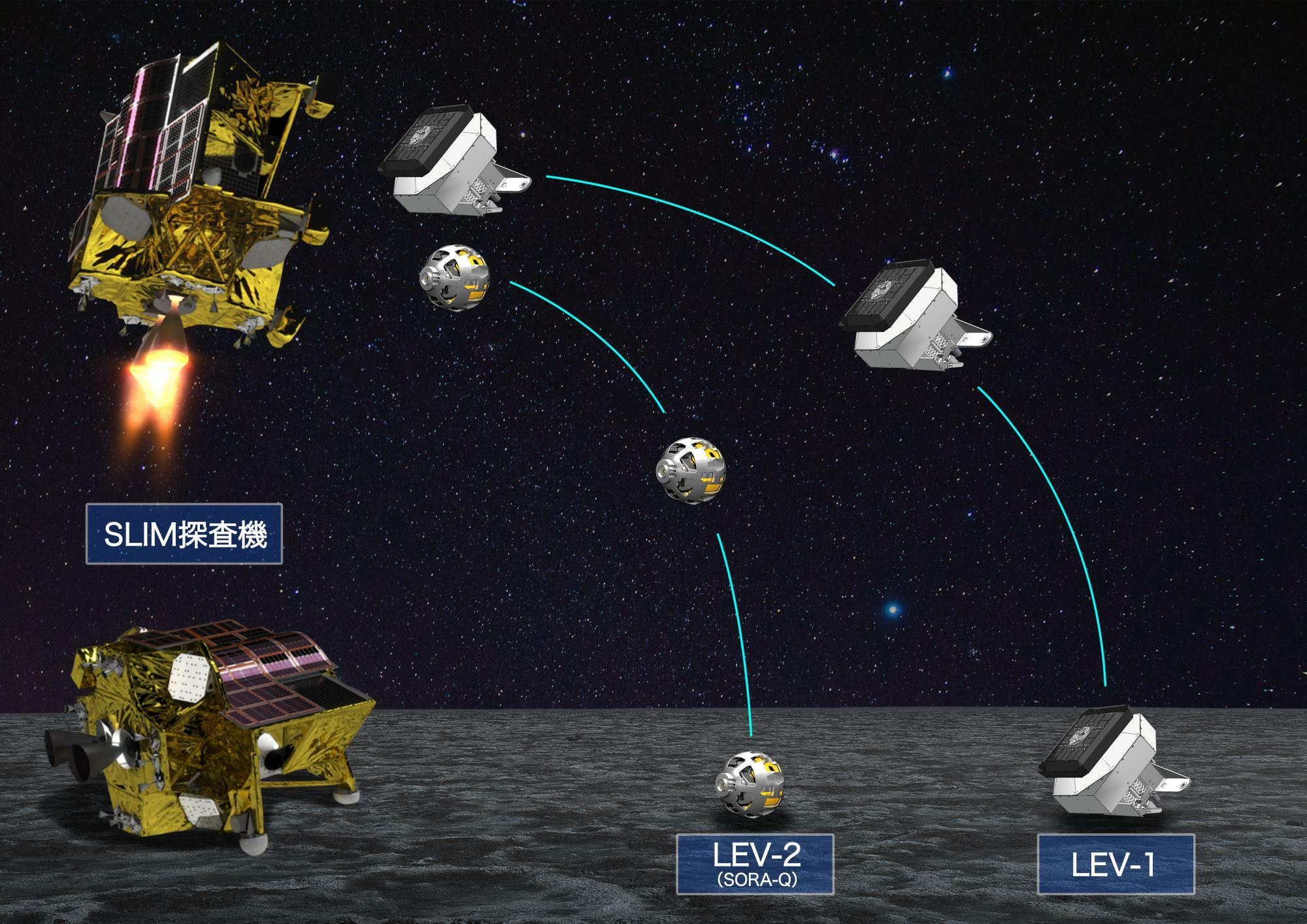
■跳躍型月面ロボット「LEV-1」
一つ目のLEV-1は重さ2.1kg、大きさは26x40x30cmと非常に小さなロボットです。月面に到着後、3メートルもの距離を跳躍移動で自由自在に移動探査します。さらに、月面のSLIMを撮影して、周囲のデータとともに地球に送信することも重要なミッションです。
■変形型月面ロボット「SORA-Q」

もう一つの月面ロボットはSORA-Qです。実はこのSORA-Q、2023年4月に月面着陸に失敗した月着陸機HAKUTO-Rにも搭載されていました。しかし、残念ながらその際は月面衝突とともに通信は回復しなかったため、今回の挑戦はリベンジとなるのです。
SORA-Qは直径約80mm、重さは250gで、JAXA、タカラトミー、ソニーグループ、同志社大学と共同で開発。月面に着陸後は、走行用の形状に変形します。
変形型月面ロボットは、タカラトミーおよび同志社大学の有する筐体の小型化技術、ソニーの有する制御技術、そしてJAXAの有する宇宙環境下での開発技術・知見を活かした、過酷な月面環境で稼働可能な超小型・超軽量の自走型ロボットです。このロボットは月面を撮影したり、砂の動きを調べたりするとのことです。
■ロボットの成果は今後の月面開発に役立てられる!?

なお、今回のミッションで取得するデータは、JAXAがTOYOTAと共同で研究を進めているルナクルーザーの自動運転技術や走行技術の設計精度向上に使用される予定とのことです。ルナクルーザーが走行する月面は、地球と比べて重力が6分の1であり、またレゴリスに覆われた路面など、地上とは異なる特殊な環境です。ルナクルーザーの自動運転技術および走行技術の詳細検討に向けて、月面において画像データ等を取得する必要があると判断したと考えられます。
二つの小型ロボットの成果が出てくるのも楽しみですね。