手触り・肌触り感を再現できるマシンを香川大が開発、初期癌の発見やスキンケアに応用


ロボットが絹ごし豆腐を扱えるようになるかもしれない。ティッシュペーパーの手触り感が人間よりも3倍も優れた触覚センサを、香川大学微細構造デバイス統合研究センター長であり創造工学部教授である、高尾英邦氏のグループ(図1)が開発した。7種類のティッシュペーパー製品を触ってその銘柄を当てられるか、という実験を行ったところ、高尾グループの開発したMEMS(Micro-ElectroMechanical System)センサと、そのセンサが出力するデータをAI(機械学習)で学習させたシステムの回答率は何と95%という高い数字を示した。これに対して一般の人間がティッシュの手触りや肌触りによって銘柄を尋ねた結果、わずか30%しか正解が得られなかった。
もはや人間の手触り感、肌触り感をマシンが超えたといえる。高尾教授らの研究は、JST(科学技術振興機構)のCRESTと呼ばれるネットワーク型研究プロジェクトから資金を得ながら、パナソニックやユニチャームとも共同研究を行ってきた。パナソニックはヘアドライヤー製品を製造しており、毛髪のキューティクルも研究していることから、スキンケア分野での応用や、医師の手術の訓練などにも生かせる、と高尾教授は期待する。
スキンケアだと、皮膚の質感を定量的に知ることができ、新しい化粧品の開発や美容ビジネスなどにも応用できる。定量的な数値で肌触りを表現できるため、肌がすべすべやプルプルになる化粧品や薬の開発に威力を発揮しそうだ。医療では、人間の臓器の中に出来る癌の部分を触覚センサで見つけることができる。従来だと、癌治療専門のベテラン医師しか見つけられないような、ごく初期の癌を経験の浅い医師でも高い確率で見つけることができるようになる。高尾教授は、このセンサ開発でCEATEC 2023のデバイス部門でCEATEC Awardを受賞した(図2)。

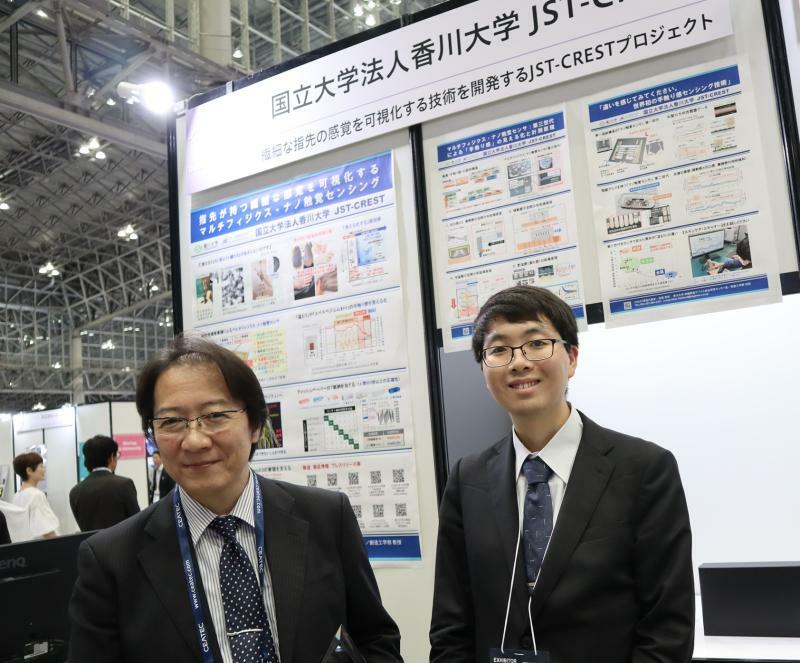
どうやって人間の微妙な手触り感を機械的に見える化したのだろうか。開発したMEMSセンサとは、シリコンを微細に加工したもの。バネのある可動部分を作製、表面の凹凸を検出し、加えて90度向きを変えた可動部分も設け、ここで摩擦力を測定できるようにした(図3)。
表面凹凸と摩擦力を測定する、この複合センサで試料表面をなぞって走査していく。表面に垂直方向では微細な凹凸を検出し、表面の双方向では摩擦力を検出する。表面凹凸センサ部分は上下運動を行い、摩擦力センサは左右運動を行う。
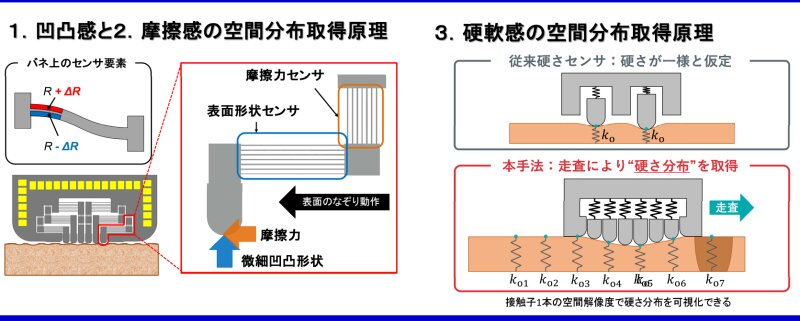
さらに試料表面では、固いもの(例えば人のほくろ)や柔らかいもの(例えば人のほっぺた)があるため、その界面ではセンサ出力が飽和する恐れがある。そこで、人間の指紋のように柔らかい試料と固い試料を平面上で区別できるようにするため、指紋センサも集積した(図4)。
人間には、ぬくもり感といった冷温感も備えている。そこで、ぬくもりを感じるセンサとしては、センサモジュールに内蔵した微小なヒーターを利用する。ヒーターからの一定温度が試料表面に伝わり、その熱抵抗から温度勾配を求め、距離と熱伝導率から熱流束を求めることができる。熱は温度センサで検出する。
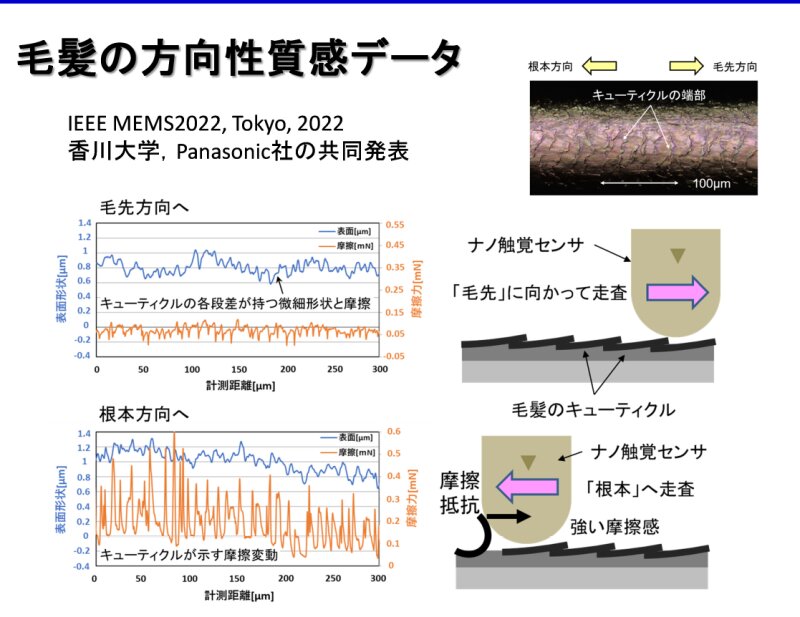
試料として毛髪を根元から先方向へなぞると摩擦は少ないが、その逆に先から根元に向かって走査すると摩擦力が顕著に働く。これは毛髪表面のキューティクルに沿うか、逆らうかによって出力波形が大きく異なる(図5)。
そして最初の7種類のティッシュペーパーの手触り感によってティッシュ製品を95%見分けられるようになった実験が図6である。
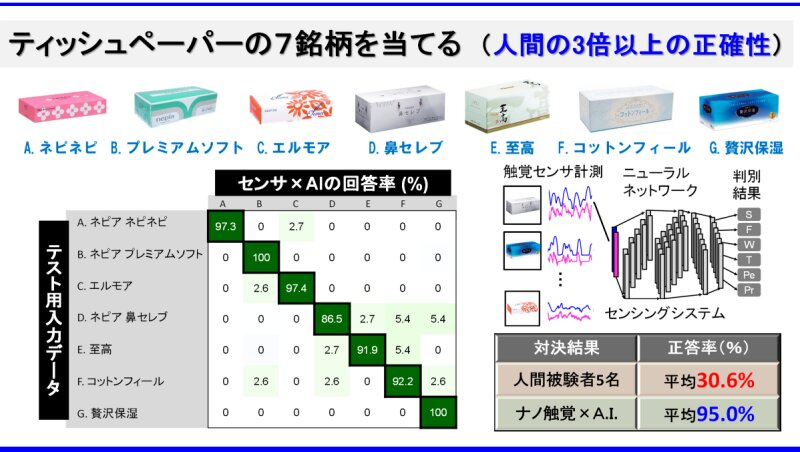
ここでは、出力の波形データを大量にとり、ニューラルネットワークモデルで機械学習させており、マシン側は学習された大量のデータを基にティッシュの種類を推定する。人間は手触り感や肌触り感、ぬくもりなどの表現ではマシンにかなわなくなった。将来、このセンサをロボットハンドに搭載すれば、ロボットは手触り感やぬくもり感を理解し、柔らかい絹ごし豆腐を持てるようになるかもしれない。