はやぶさ2ステータス:ターゲットマーカの名前検索が可能に。一方でローバー2に不具合


2018年11月8日、JAXAの小惑星探査機はやぶさ2チームは、これまでのはやぶさ2運用の成果を報告した。小惑星リュウグウへのタッチダウン(着陸)に向けた3回目のリハーサルでは、着陸の目印として投下されたターゲットマーカを分離し、追跡することに成功した。一方で、2019年夏に投下予定の3台目のローバー、「MINERVA-II2」は動作状態に問題があり、限られたミッションしか遂行できない可能性が高いことが公表された。
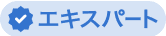
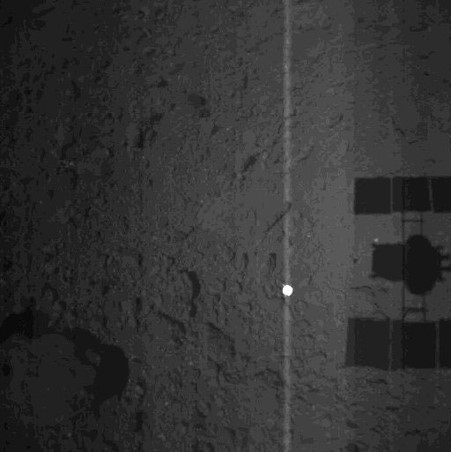
はやぶさ2本体の運用報告では、10月23~25日に行ったタッチダウンリハーサル3回目の成果が報告された。10月25日にはやぶさ2は着陸地点の第一候補である「L08-B」地点に向けてターゲットマーカを投下。はやぶさ2は小惑星表面から高度12メートルまで降下し、投下したターゲットマーカとその周辺を撮影した。L08-B中心からターゲットマーカまでは15.4メートルであり、これが現時点での航法誘導の精度となる。
ミッションマネージャの吉川真准教授によれば、ターゲットマーカは目標から5メートルほどはみ出しており、これをトラック(追跡)しながらタッチダウンができる可能性はあるものの、誘導の精度として十分であるかどうかは今後に判断するという。
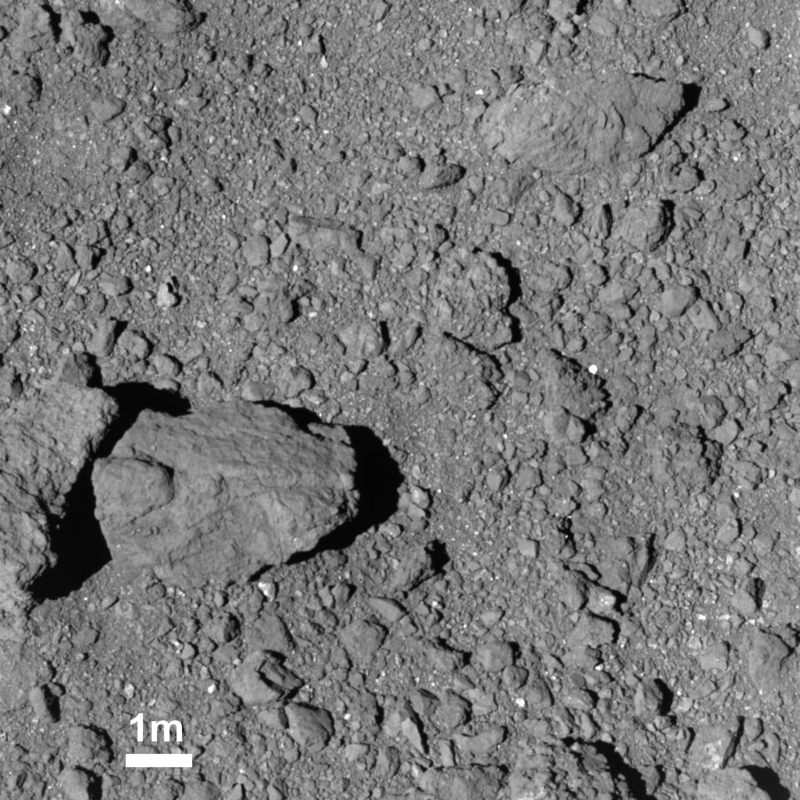
投下されたターゲットマーカには、打ち上げ前年の2013年に開催された応援キャンペーンに応募した18万3174人の名前が記され、縫い込まれている。JAXAは、「星の王子さまに会いにいきませんかミリオンキャンペーン2」サイトで登録者が検索するとターゲットマーカのどこに名前が乗せられているのか確認できるサービスを開始した。キャンペーン登録時に送られたID番号、または登録した名前で検索すると、名前を印字したフィルムの搭載位置がわかる。
3台目のローバー運用は限定的に
これまで、9月から10月まではやぶさ2に搭載された小型探査ロボット、「MINERVA-II 1A・1B(ミネルバ2-1A・1B)」と欧州が開発した「MASCOT」はいずれも順調にリュウグウへの投下・探査ミッションを実施してきた。ところが今回、東北大学を始めとする大学コンソーシアムが開発した小型ローバー「MINERVA-II2(ミネルバ2-2)」の動作に不具合があり、2019年7月に予定されている投下ミッションを実施しても設計された機能を発揮できない可能性が高いことが公表された。
ミネルバ2-2は、小惑星探査ロボット「ミネルバ」の挑戦に大学も参加することを目的として開発がスタートした。初代「はやぶさ」に搭載されたローバー「MINERVA」を参考に、質量877グラムで4種類の移動機能を持った探査ロボットとして開発された。
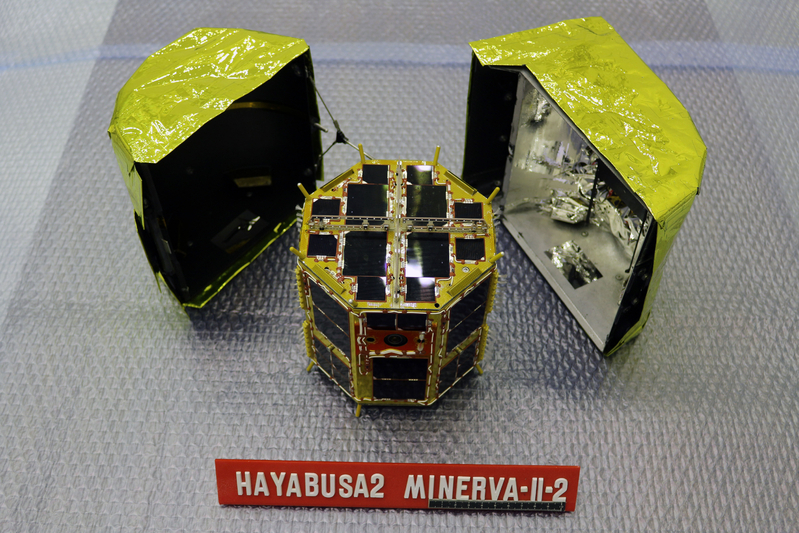
ローバー内部でモーターを回転させて跳ねる(ホッピング)移動を行うミネルバ2-1に対して、ミネルバ2-2はこれとは異なる移動の仕組みを検証する。「複合型移動アクチュエータ」と呼ばれ、山形大学は“バイメタル”と呼ばれる熱による膨張の度合いが異なる2種類の金属を接着した部材を使用し、電気を使わずに小惑星表面の温度の変化によって形状が変わり、その力で移動する仕組みを提供。大阪大学は板バネの力を開放して移動する仕組みを設計した。東京電機大学は、永久磁石を使って内部で衝突が起きる仕組みによって移動する力を発生させる。東北大学は、携帯電話のバイブレーターのような小さな振動によって、ジリジリと小惑星の表面をなぞるように移動する機構を採用した。4つの異なるローバーの動作を検証できるよう、東京理科大開発によるカメラ2台も搭載している。
ミネルバ2-2は、2017年10月の軌道上の動作確認の段階では、通信できていることが確認されていた。しかし、内部でデータ処理を行うFPGA(ユーザーが用途に合わせて機能を組み替えられる集積回路)の動作が不安定で、通信機は“コマンドを受信した”という反応を示すものの、その後に機器の状態を示すハウスキーピングデータが取得できないという。東北大学の吉田和哉教授は、「現時点では当初に設計した機能が全て発揮できる可能性は低いと判断」したといい、特に「カメラで撮影したデータが来る可能性は低い」と不具合の状況を説明した。

人工衛星などの宇宙機に搭載されるFPGA内は、宇宙空間で放射線によって誤動作が起きることが知られている。だが、今回のミネルバ2-2の不具合はそれが原因ではないようだ。吉田教授の説明によると、「開発時にはコンポーネントを並べて動作試験などを行っていた。最終的に組み上げたところ動作に不具合がでるようになった。アース線の取り回しなど、電気的な環境が変わった可能性がある」という。
不具合は最終試験の段階で発生したとのことであり、宇宙の過酷な環境がローバーに与えた影響が原因というわけではないようだ。搭載前にどこまで踏み込んだ試験ができていたのか、という疑問は残るが、現在はローバーの投下中止といったミッション断念の判断ではない。吉田教授は、「はやぶさ2から給電している状態から、分離して太陽電池からの電源に切り替わると、状態が変わることもありうる。決して、きっと切り離したらうまくいくという運任せではなく、科学的に有意義な成果を得られるようにする。たとえば山形大のペイロードは電源なしでも飛び跳ねることができる。実際に動いたかどうかの検証にはかなり工夫が必要だが、切り離して落ちていく過程で、生きている通信系を使うことなども検討する」と述べた。