はやぶさ2は「危ないときは自分でミッション中止」ができるロボット。明日から着陸のリハーサルへ


2018年9月11日~12日、JAXA 宇宙航空研究開発機構が運用する小惑星探査機「はやぶさ2」は小惑星リュウグウへの着陸に備え、タッチダウン(着陸)のリハーサルを開始する。
はやぶさ2は10月下旬にリュウグウ表面に着陸し、小惑星表面のサンプルを採取する予定だ。だが、2018年6月後の到着後の観測で、リュウグウは小惑星のほとんど全体に「ボルダー」と呼ばれる岩塊が散らばっていることがわかった。探査機が安全に降りられるよう、ボルダーのない直径100メートルの平坦な部分があり、ボルダーは高くても50センチメートルまで、という条件を満たす着陸地点を探さなくてはならない。8月17日に行われた会議で、着陸地点候補はリュウグウの赤道に近い3箇所に絞られた。
9月11日からのリハーサルでは、この着陸地点候補近くで、高度30メートル以下まで降下する予定だ。はやぶさ2チームスポークスパーソンの久保田孝教授によれば、タッチダウンリハーサルを行い、候補地点の写真やその周辺を撮影し、情報収集を行う。これは最終的な目的地を決めるためのものだが、取得した情報によってはすぐには着陸地点を決めることができないかもしれない。リハーサルは10月中旬にもう一度予定されており、10月下旬に予定されている着陸日程はまだ変更になる可能性がある。
着陸地点が予想以上に厳しい条件だということがわかった場合に、はやぶさ2は「アボート」と呼ばれる着陸の中止を自ら判断して行うことができる。「『これは難しい』と判断したときに戻ることもタッチダウンリハーサルの目的の一つ」(久保田教授)だという。
ローバー「MINERVA-II-1」は今度こそ。成否を分けるはやぶさ2の判断力
この、はやぶさ2が自分で危険な状況を判断して与えられたミッションの中断を行う機能は、搭載された小型の小惑星探査ロボット「MINERVA-II-1(ミネルバ2-1)」の分離と着陸の安全性を高める意味でも重要だ。
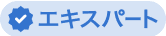
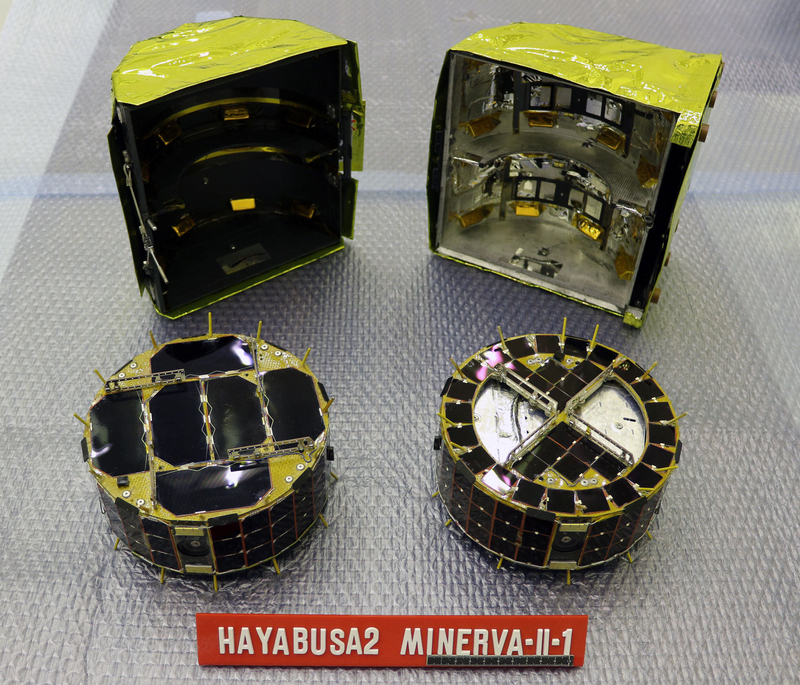
ミネルバ2-1は、円筒形に近い形をした2機1組の小型小惑星探査ロボット(ローバー)だ。全部で3回予定されているリュウグウへの探査ロボット投下ミッションの第1回の主役となり、9月21日にはやぶさ2本体から切り離され、投下される。小惑星の表面でモーターを使って跳ねて移動するホッピング機能を持っており、移動しては着地した場所の写真を撮影して、母船であるはやぶさ2に送る、というミッションを担う予定だ。
ミネルバに「2」と付いている理由は、初代「はやぶさ」にも同じ名前の小型探査ロボット「MINERVA」が搭載されていたからだ。初代ミネルバは小惑星への投下の際に目標のスピードを超えて切り離されてしまい、小惑星イトカワの表面に着陸することができなかった。着陸できなかったミネルバの所在は不明だが、今でもイトカワの周辺を漂い、太陽を巡る軌道に乗っていると考えられている。
初代ミネルバが着陸に失敗した背景には、地上からのコマンドが届くまで17分かかる小惑星との距離のために起きたタイミングのズレがある。地球からミネルバ切り離しのコマンドが送られ、実行に移されたタイミングではやぶさは運悪くイトカワ表面から上昇中だった。そのため、最適のスピードではない状態で切り離されてしまい、着陸することができなかったのだ。
こうしたことが起きないよう、はやぶさ2はミネルバ2を始めローバーの安全を守るための自律判断機能が備わっている。何か不具合があって緊急上昇しているといった場合には、ミネルバ2切り離しを指示されていても中断する。安全が確認されてから再チャレンジすることになる。成功すれば、世界で初めて「小惑星の表面に観測のために着陸した宇宙機」になる。ちなみに、「小惑星の表面に着陸」は初代はやぶさが、「小天体の表面に観測のために着陸」は彗星に着陸したESA(欧州宇宙機関)の彗星探査機「ロゼッタ」搭載の着陸機「フィラエ」がそれぞれ世界初の記録を持っている。
ミネルバ2-1は、小惑星リュウグウの表面で1回に15メートルほどホップして移動しながら温度を測る、写真を撮るといった観測を開始する。ミネルバ2-1Aにはカメラが4個、ミネルバ2-1Bにはカメラが3個搭載され、小惑星のステレオ画像が撮影可能だ。ホップにあたって姿勢を整えるという作業を必要とせず、ある程度まではどんな姿勢からでも再ホップが可能だ。ただし、方向を定めたり、ホップのスピード(当初は秒速5センチメートル)を自在に変えるということはできない。ミネルバ2-1達の行き先はいわばモーターまかせとなる。着地した先で光や温度を観測し、日陰で太陽電池に光が当たらない、はやぶさ2本体と通信できない、といった状態となっているとそれをトリガーにしてミネルバ2-1は再ホップを試みるなどの行動を起こす。2機のうちミネルバ2-1Aは小惑星表面の温度が高すぎると機能を休止し、“お昼寝”して条件がよくなるのを待つという機能が備わっている。基本的に同型である2機のミネルバ2-1だが、このように少し構成が異なるため、NASAの双子の火星探査機「スピリット」と「オポチュニティ」のように2機のローバーで運命が異なる、ということもありそうだ。
10月には「MASCOT」の出番。水の存在に手がかりが得られるか?
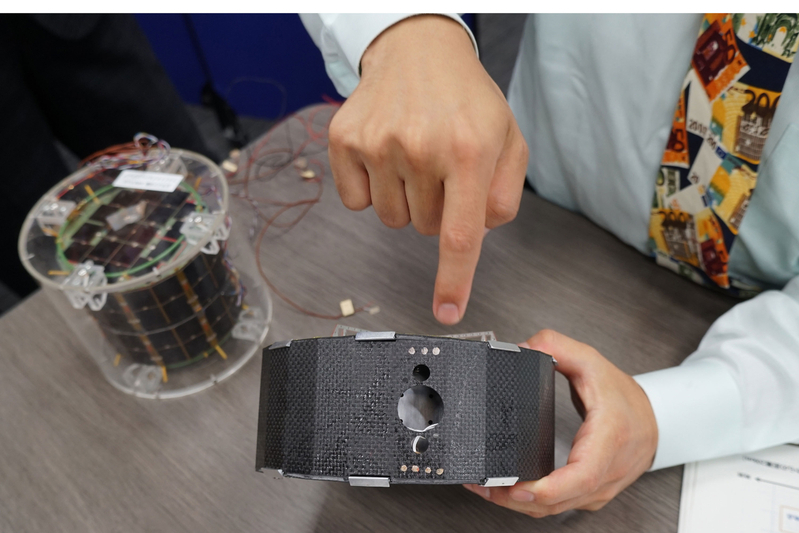
ミネルバ2-1は9月21日の投下から数日、運が良ければもうしばらく活動を続けると期待されている。その後の10月3日には、彗星探査機ロゼッタとフィラエを開発したDLR(ドイツ航空宇宙センター)とCNES(フランス国立宇宙研究センター)製作による着陸機「MASCOT(マスコット)」がはやぶさ2から切り離されて投下される。母船はやぶさ2との通信機能はミネルバ2用からマスコット用に切り替えられる。
重さ1.1キログラムほどのミネルバ2-1に対し、マスコットは約10キログラムとかなり大きく、4台の観測装置を備えている。観測時間は電池が消耗するまで16時間と限られているが、顕微鏡に広角カメラ、熱放射計、磁力計と観測能力は幅広い。中でも注目したいのが、「MicrOmega(マイクロオメガ)」と呼ばれる鉱物の組成を調べる分光顕微鏡だ。
8月2日のはやぶさ2プロジェクトによる発表では、はやぶさ2搭載の近赤外分光計「NIRS3(ニルス3)」チームの観測によると、小惑星リュウグウの表面に期待されていたような水の存在を示す手がかりが見つからなかった。もちろん、まだリュウグウに水がないと断定することはできず、観測しにくい極域や太陽の光の影響を受けない地下に存在している可能性も高い。そこで、2019年に予定されている小惑星の表面に人工のクレーターを作って地下の物質を採取する3回目のタッチダウンの結果が待たれるところだ。
一方で、マスコット搭載のマイクロオメガ分光顕微鏡は、炭素や「ヒドロキシ基」と呼ばれる水の分子を含んだ物質を確認することができる。小惑星に存在する水は、液体や氷となっているわけではなく、鉱物に含まれた状態だと考えられている。マイクロオメガの機能が、まだまだ不明なことが多い小惑星リュウグウの水の謎の解明で、はやぶさ2本体の観測と今後に持ち帰るサンプル分析とをつなぐカギになるかもしれない。
ここまで、2018年9月から10月まで重要ミッションが目白押しとなっているはやぶさ2の予定を紹介した。引き続き、ミッションや観測の成果を紹介したい。