はやぶさ2搭載カメラから宇宙旅行、植物工場まで。大学発の宇宙技術


2019年8月29~30日まで東京ビッグサイトでは新エネルギー・産業技術総合開発機構(NEDO)主催による大学技術見本市「イノベーション・ジャパン 2019」が開催された。JAXAの小惑星探査機はやぶさ2に搭載され、小惑星の表面を撮影したカメラや2027年打上げを目指す有人宇宙船、超小型衛星や惑星探査が可能な群ロボット、月面植物工場など、大学発の技術で宇宙を目指している。

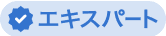
東京理科大学のブースには、JAXAの小惑星探査機はやぶさ2の本体側面に取り付けられた「CAM-H(小型モニタカメラ)」が登場。同大の木村真一教授が開発したCAM-Hは、はやぶさ2が7月に小惑星リュウグウへタッチダウンした際には、サンプラーからの弾丸発射やエンジン噴射に対して小惑星表面の破片が舞い上がる様子を撮影した。木村教授開発のカメラはソーラーセイル実証機IKAROSの分離カメラ「DCAM」や2019年1月にイプシロンロケット4号機で打上げられた東北大学の超小型衛星RISESATでも搭載されている。RISESATでは、カメラを衛星の6面に取り付け、全天をパノラマ撮影するミッションを今後行う予定だという。
木村教授は将来、衛星がカメラで物体を認識して接近、操作するシステムへつなげる目標がある。スペースデブリ(宇宙ゴミ)を除去する衛星がターゲットとなる物体をカメラで認識し、その方向へ衛星の動きを制御するといった「目+頭脳」を実現するもので、木村教授は宇宙ゴミの除去を目指すアストロスケール社の技術顧問を務めている。
東京理科大学には、2019年春からロケット工学の米本浩一教授が就任。サブオービタル(弾道)飛行を行う有翼式再使用型ロケットの開発を行っている。「WIRES」と名付けられた小型実証機の飛行試験を九州やアメリカで実施し、2022年には実験機を宇宙へ打上げ、2027年には宇宙旅行ベンチャー企業SPACE WALKERの機体として日本でサブオービタル宇宙旅行を実現する目標だ。

完成すれば、乗客6名が搭乗できるサブオービタルスペースプレーン。展示パネルに機体愛称「Nagatomo」と記されている点が目を引いた。命名の由来である宇宙科学研究所の長友信人教授は、東京大学生産技術研究所の糸川英夫博士の研究室で日本のロケット最初期の開発に携わり、また日本で初めて電気ロケット(電気推進エンジン)を研究し、後にはやぶさ、はやぶさ2に搭載されたイオンエンジン開発の端緒を開いた。ソーラーセイル推進の国際共同開発を提案したこともあり、その構想はIKAROSへとつながっている。宇宙旅行を可能にする再使用型ロケットの「観光丸」提案者でもあり、米本教授には師に当たる長友教授の名を、日本発のスペースプレーンの名として残したいという想いがうかがえる。
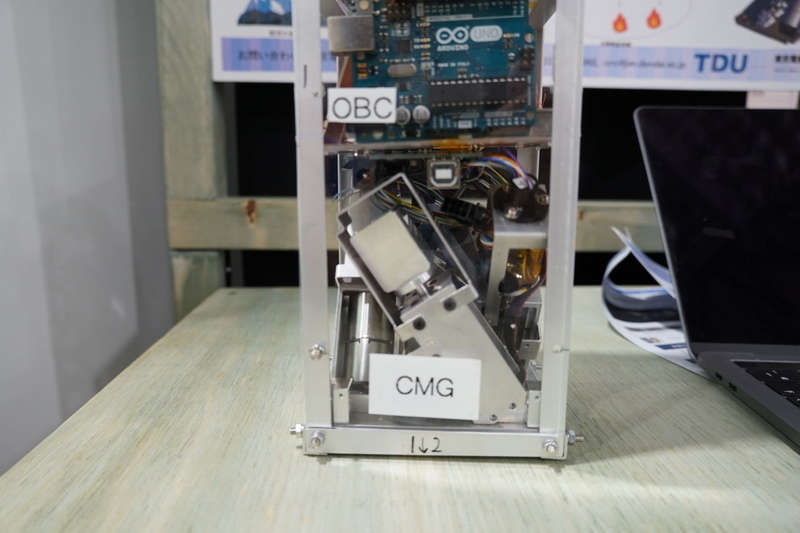
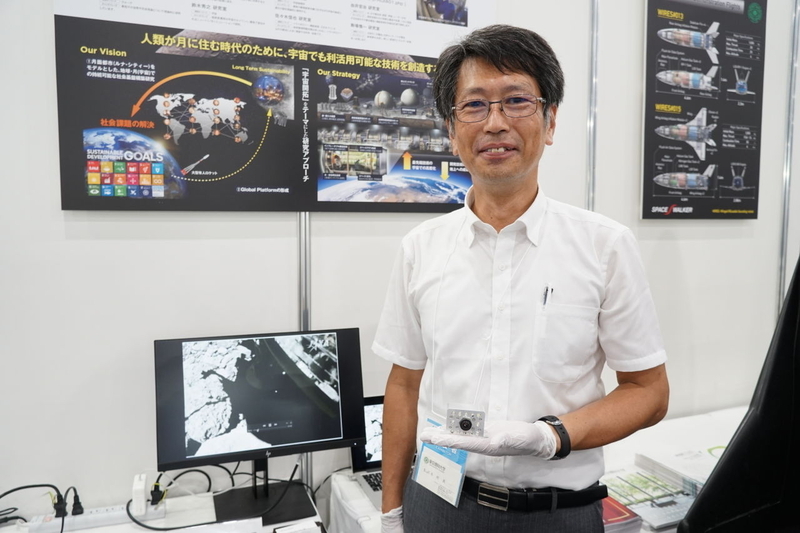
東京電機大学のブースには、2年後の打上げを目指す超小型衛星「HATOSAT」の開発機が登場した。キューブサットと呼ばれる衛星規格で3U(10×10×30センチメートル)サイズの衛星は、地上で登山者などが持つ通信機の情報を衛星へ集約するストア・アンド・フォワード技術の実証機。衛星を介して地上のセンサーをネットへ組み込むIoT衛星の実現を目指す。HATOSATは3Uのサイズに姿勢制御装置CMG(コントロール・モーメント・ジャイロ)を搭載し、地上の小さな通信機と安定して通信する機能を実現しようとしている。CMGはこれまで、数千キログラム以上の大型の地球観測衛星や国際宇宙ステーションで使用されていたもので、キューブサット搭載型で実証できれば世界初となる。

東京電機大学からは、JAXAと共同研究中の「群ロボット」も登場した。小さな複数のロボットが「リーダー」と「フォロワー」に分かれ、協調しながら惑星表面探査などのミッションを行う技術だ。写真の赤いランプのロボットがリーダー、青はフォロワーに当たる。フォロワーロボットはリーダーを色で認識し群れで行動しながら、障害物の存在など環境に応じて群れの形を変えたり、ミッションに応じて小さな群れに分離するといったことができるという。リーダーロボットと集中して通信を行うことで、宇宙のように通信のリソースが限られたところでも活躍できる探査ロボットにつながる。


大阪府立大学からは、植物工場と魚の飼育槽を組み合わせた物質循環型の野菜生産システムが登場。レタス、ラディッシュ、ケールといった野菜の水耕栽培とドジョウの水槽が一体化し、水を循環させながら野菜栽培と魚の養殖が可能になる仕組みだ。完全閉鎖系でなく、野菜の肥料やドジョウの餌などは外から与える仕組みだが、宇宙の限られた空間で食糧生産と空気や水の循環を可能にする。レタスなどの葉物野菜は成長が早く栽培しやすいということだが、将来はサツマイモも候補になるという。サツマイモは、甘くてカロリー源となる塊根だけでなく、茎や葉も野菜として食べられる効率のよい植物だ。宇宙の食事を支えるのはサツマイモかもしれない。

これから宇宙開発につながる技術もある。大分大学では、竹を原料としたセルロースナノファイバー「CELEENA」を展示した。現在、国内で竹はほとんど用途がなく、1970年代以降は利用減少にともなって竹林が管理されていない現状があるという。大分県は真竹を多く生産し、竹を処理してその特徴である長く丈夫な繊維を取り出すことで、広い用途が期待できるという。大分大学と宇宙システム開発利用推進機構(JSS)はCELEENAの宇宙利用を目標とした共同研究を行っている。CELEENAを樹脂と混ぜて人工衛星や宇宙探査機の推進剤タンクなどに利用することができれば、軽量化が期待できる上に極低温の環境でも素材の変化が少ないという特徴があるという。
超小型衛星の開発や探査機のミッション機器開発など、大学から登場した宇宙技術は多い。大学を知ることで、近い将来の日本の宇宙開発がうかがえる。